Created by Karina Ganich
Buď f : U → V lineární zobrazení, BU báze prostoru U a BV báze prostoru V . Pak:
(1) f je prosté právě tehdy, když BV [f]BU má lineárně nezávislé sloupce,
(2) f je „na“ právě tehdy, když BV [f]BU má lineárně nezávislé řádky.
Buď f : U → V lineární zobrazení, BU báze prostoru U a BV báze prostoru V . Označme A = BV [f ]BU . Pak:
(1) dim Ker(f) = dim Ker(A),
(2) dim f(U) = dim S(A) = rank(A).
Důkaz: podle Vlastnosti isomorfismu
Isomorfismus mezi prostory U, V nad tělesem T je vzájemně jednoznačné lineární zobrazení f : U → V . Pokud mezi prostory U , V existuje isomorfismus, pak říkáme, že U , V jsou isomorfní.
Vlastnosti isomorfismu
Lineární zobrazení f : U → V je isomorfismus právě tehdy, když nějaká (libovolná) matice reprezentující f je regulární.
Buďte U, V prostory nad T a x1,...,xn báze U. Pak pro libovolné vektory y1,...,yn ∈ V existuje právě jedno lineární zobrazení takové, že f(xi) = yi, i = 1,...,n.
Buď f : U → V lineární zobrazení. Pak následující jsou ekvivalentní:
(1) f je prosté,
(2) Ker(f) = {o},
(3) obraz libovolné lineárně nezávislé množiny je lineárně nezávislá množina.
f(x) = f(y) nastane jenom pro x = y
Důkaz: Dokážeme implikace (1) ⇒ (2) ⇒ (3) ⇒ (1).
Nechť prostor U je lineárním obalem množiny vektorů W , tedy U = span(W ). Pak říkáme, že W generuje prostor U , a prvky množiny W jsou generátory prostoru U. Prostor U se nazývá konečně generovaný, jestliže je generovaný nějakou konečnou množinou vektorů.
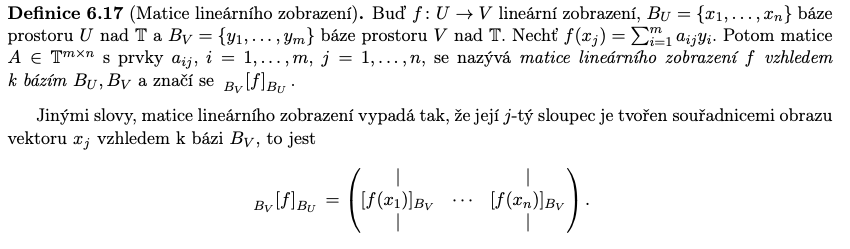
Buď f : U → V lineární zobrazení, BU = {x1,...,xn} bázeprostoru U, a BV ={y1,...,ym} báze prostoru V. Pak pro každé x∈U je
[f (x)]BV = BV [f ]BU · [x]BU
Tedy pokud chceme spočítat matici LZ, tak sestrojíme matici (vektory z BU | vektory z BV) a spočítáme jí tak, že levou stranu převedeme na kanonickou bázi. Výsledkem bude pravá strana matice.
Jinak řečeno - najdeme inverzní matici k BU a pak vynasobíme matici BV inverzem
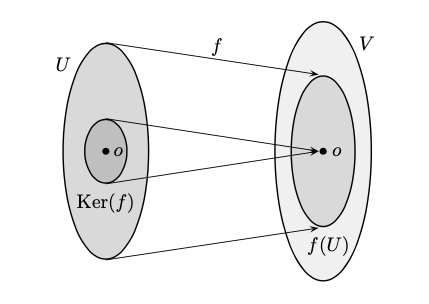
Buď f : U → V lineární zobrazení. Pak definujeme
• obraz f(U) := {f(x); x ∈ U},
• jádro Ker (f) := {x∈U; f(x) = o}
Obraz má význam jako obor hodnot zobrazení (na obrázku f(U)).
Jádro popisuje rysy LZ. Čím větší je jádro, tím více zobrazení vygeneruje, více vektorů se zobrazí na tu samou hodnotu - tím menší dimenzi bude mít obraz vzhledem k dimenzi U.
Důsledek: dim U = dim Ker(f) + dim f (U)
Důsledek 2: LZ f : U → V je „na“ právě tehdy, když se nějaké generátory prostoru U zobrazí na generátory prostoru V
Buďte U, V vektorové prostory nad tělesem T. Zobrazení f : U → V je lineární, pokud pro každé x, y ∈ U a α ∈ T platí:
• f(x+y)=f(x)+f(y),
• f(αx) = αf(x).
Lineární zobrazení vnořuje jednu strukturu do druhé. Např. pokud platí rovnost x + y = z, platí i pro její obrazy f(x) + f(y) = f(z)
Buď f : U → V lineární zobrazení, BU báze prostoru U a BV báze prostoru V . Pak jediná matice A splňující [f (x)]BV = BV [f ]BU · [x]BU je A = BV [f ]BU
Buď V vektorový prostor a B1, B2 dvě jeho báze. Pak maticí přechodu od B1 k B2 nazveme matici B2 [id]B1.
Matice přechodu má pak podle maticové reprezentace tento význam: Buď x ∈ U, pak
[x]B2 = B2 [id]B1 · [x]B1,
tedy pouhým maticovým násobením získáváme souřadnice vzhledem k jiné bázi. Zřejmě platí B[id]B = In pro libovolnou bázi B.
Maticí přechodu od báze B1 k bázi B2 by měla být matice, v jejíchž sloupcích budou souřadnice vektorů staré báze B1 vzhledem k nové bázi B2.
Spočitáme matici přechodu od B1 k B2 tak, že sestrojíme matici (vektory z B2 | vektory z B1) a levou stranu převedeme na kanonickou bázi. Výsledkem bude pravá strana matice.
Buď T těleso s neutrálními prvky 0 pro sčítání a 1 pro násobení. Vektorovým prostorem nad tělesem T rozumíme množinu V s operacemi sčítání vektorů + : V2 → V , a násobení vektoru skalárem: T×V →V splňující pro každé α,β∈T a u,v∈V:
(1) (V,+) je Abelova grupa, neutrální prvek značíme o a inverzní k v pak −v,
(2) α(βv) = (αβ) (asociativita),
(3) 1v = v,
(4) (α + β)v = αv + βv (distributivita),
(5) α(u + v) = αu + αv (distributivita).
Buď V vektorový prostor nad T. Pak lineární forma (nebo též lineární funkcionál) je libovolné lineární zobrazení z V do T. Duální prostor, značený V ∗, je vektorový prostor všech lineárních forem.