Created by Pavel Klavík
Autor: Pavel Klavík
Poslední změna: 24.11.2016
Poděkování: Zdeněk Hedrlín, Peter Zeman, studenti pokročilých cvičení.
V současné chvíli jsou tato hlavní témata:
Následující témata jsou rozpracovaná:
Asociace, kde je to nutné, jsou popsány v jednotlivých oknech. Pro důležité asociace je vytvořeno speciální okno mezi pojmy, například pro maticovou reprezentaci lineárního zobrazení.
Obsah je utvořen podle výuky na Pokročilých cvičeních z Lineární algebry a knih Povídání o lineární algebře a Lineární algebra II: Pokročilé cvičení (převzaty skoro všechny obrázky).
Matematická struktura 𝔾 spolu s binární operací ∘ : 𝔾 ⨯ 𝔾 → 𝔾 se nazývá grupa, pokud splňuje následující vlastnosti:
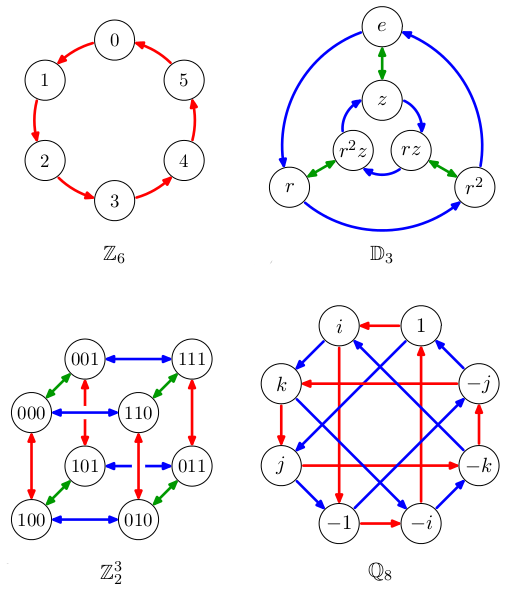
⟨g1, ..., gk⟩ = 𝔾.
Jednotlivým generátorům přiřadíme barvy a i-tou barvou nakreslíme šipky z x do gi∘x. Tím je zachycena struktura celé grupy a je to mnohem přehlednější než popisovat binární operaci ∘ tabulkou.
Grupy vlevo jsou komutativní: grupa sčítání modulo 6 a grupa binárních vektorů. Grupy vpravo však komutativní nejsou, například pro 𝔻3 je modrá šipka následovaná zelenou něco jiného než naopak. Grupa 𝔻3 je grupa symetrických transformací rovnostranného trojúhelníka, kde operace ∘ je skládání. Grupa ℚ8 je grupa imaginárních jednotek kvaternionů (zobecnění komplexních čísel) a operace popisuje jejich násobení.
Vektor u je v množině X nadbytečný, pokud ⟨X \ {u}⟩ = ⟨X⟩. Nadbytečné vektory můžeme z množiny postupně odebírat a nezmění se její lineární obal. Motivace je, že chceme lineární obal ⟨X⟩ popsat pomocí co nejmenší množiny vektorů.
Uvažme rovinu vzniklou jako lineární obal tří vektorů. Libovolný z nich je nadbytečný, jeho odebráním se obal nezmění. Po odebrání nejsou již zbývající dva vektory nadbytečné.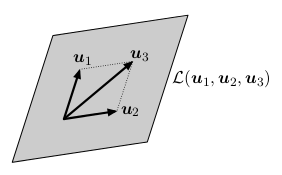
Množina vektorů X je lineárně závislá, pokud obsahuje nadbytečný vektor, a lineárně nezávislá jinak.
Tvrzení: Následující definice lineární závislosti x1,...,xn jsou ekvivalentní:
I když jsme skoro celou lineární algebru popisovali nad reálnými čísly ℝ. Avšak celou řadu speciálních vlastností ℝ jsme nikdy nepoužili. Například pro řešení soustavy lineárních rovnic Gaussovou eliminací nepotřebujeme vědět, že existují odmocniny nebo limity Cauchyovských posloupností. Můžeme proto místo ℝ použít libovolnou matematickou strukturu čísel zvanou algebraické těleso, která splňuje několik pravidel.
Definice algebraického tělesa. Matematická struktura 𝕋 spolu s dvěma binárními operacemi sčítání + : 𝕋 ⨯ 𝕋 → 𝕋 a násobení * : 𝕋 ⨯ 𝕋 → 𝕋 se nazývá těleso, pokud splňuje následující vlastnosti:
Tedy těleso jsou dvě grupy svázané distributivitou.
Příklady těles. Vyjma ℝ jsou standardní příklady nekonečných těles komplexní čísla ℂ a racionální čísla ℚ. Existují i konečná tělesa, která jsou dokonce přesně charakterizovaná.
Zobecnění vektorových prostorů. Ve většině diagramu se uvažují vektorové prostory nad tělesem reálných čísel ℝ, tedy prostory ℝn. Je však možné uvažovat prostory nad libovolným tělesem 𝕋. V konkrétní definici dostáváme prostory 𝕋n, v abstraktní defici jsou skaláry z 𝕋 místo ℝ. Také matice se uvažují nad tělesem 𝕋 jako 𝕋m x n. Například v informatice je užitečný prostor binárních vektorů ℤ2n.
Velká část výsledků lineární algebry popisovaných v tomto diagramu funguje bez jakékoliv změny pro vektorové prostory nad obecnými tělesy 𝕋. V následujících částech jsou odlišnosti:
Věta: Nechť X je libovolná množina vektorů a Y je lineárně nezávislá množina vektorů z ⟨X⟩. Potom existuje Z ⊆ X, že |Z|=|Y| taková, že
⟨X \ Z ∪ Y⟩ = ⟨X⟩.
Tato věta má řadu zajímavých důsledků:
Důkaz:
Nechť Y = {y1,...,yn}. Postupně vkládáme vektory Y jeden za druhým do X za pomocí lemmatu o výměně. Problém by však mohl být, že při vložení yi by lemma mohlo vyjmout předtím vložené yj.
Uvědomme si však, že v lemmatu o výměně můžeme zvolit jako z libovolné xk takové, že koeficient 𝛼k ≠ 0. Proto vždy při vkládání yi vyjmeme některý z vektorů X. Pokud by to nebylo možné, dostáváme, že yi je lineární kombinace ostatních vektorů z Y, což je spor s lineární nezávislostí Y.
Tagy: #klicove
Konečné těleso je tvořeno konečně mnoha prvky a nazývá se Galoisovo těleso, značeno GF(n) pro n prvků. S konečnými tělesy se dobře pracuje v počítačích a mají třeba řadu aplikací v kryptografii a teorii kódování.
Nejjednodušší příklady těles jsou prvočíselné velikosti:
Tvrzení:
Struktura ℤn je tvořena prvky {0,1,...,n-1}, s operacemi sčítání a násobení definovanými modulo n. Struktura ℤn je těleso, právě když n je prvočíslo p.
Důkaz:
Pokud n není prvočíslo, je snadné ukázat, že neexistují inverzní prvky pro násobení. Existují 1 < a,b < n takové, že a*b = n. Tedy a*b = 0 v ℤn, což není v tělese možné.
Obtížnější je dokázat, že existují inverzní prvky pro násobení v ℤp. Stačí ukázat, že násobení k je bijekce na ℤp.
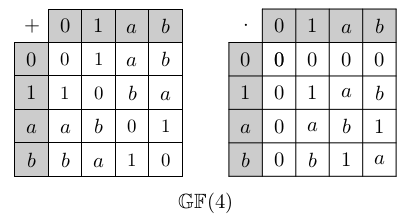
Složitější konečná tělesa však existují i pro jiné velikosti, například GF(4) vpravo.
Věta: Každé konečné těleso je řádu pk, kde p je nějaké prvočíslo a k je přirozené číslo. Navíc pro každé pk těleso vždy existuje a je určené jednoznačně až na izomorfismus, tedy značení GF(pk) dává smysl.
Náznak důkazu: Mějme konečné těleso 𝕋, chceme dokázat, že jeho velikost je pk. Charakteristika 𝕋 je nejmenší počet jedniček, který se sečte na nulu, a vždy je to prvočíslo p. Tyto součty jedniček tvoří podtěleso izomorfní ℤp. Hlavní trik je, že 𝕋 tvoří vektorový prostor nad tělesem ℤp. Ten má nějakou dimenzi k, a proto obsahuje pk prvků.
Jednoznačnost tělesa velikosti pk vyplývá z věty o izomorfismu. Konstrukce takového tělesa je složitější a postupuje se přes okruhy polynomů a jejich rozkladová tělesa, detaily vynecháme.
Dimenze vektorového prostoru či jeho podprostoru je velikost libovolné jeho báze. Pro vektorový prostor V se dimenze značí dim(V).
To, že je dimenze dobře definována, vyplývá ze Steinitzovy věty o výměně. Mějme dvě libovolné báze X a Y. Můžeme vektory báze X vyměnit za vektory báze Y a naopak, proto musí mít stejně prvků.
Pozorování: Pokud U je podprostor V, potom dim(U) ≤ dim(V).
Tagy: #klicove
Celá teorie bází by byla nezajímavá, pokud by žádná báze neexistovala. Dokážeme si s následujícím předpokladem, že báze vždycky existuje (a dokonce je spousta způsobů, jak je zvolit).
Předpoklad: Vektorový prostor má konečnou dimenzi, tedy libovolná báze má konečnou velikost. (Dokonce podle Steinitzovy věty by stačilo, že existuje báze konečné velikosti.)
Bez předpokladu bychom museli uvažovat i nekonečně dimenzionální vektorové prostory (třeba prostory funkcí nebo posloupností), pro než jsou potřeba nekonečné báze. Myšlenkově to funguje totožně, ale je s tím řada technických problémů, například musíme uvažovat nekonečné lineární kombinace.
Nefungující nápad: odebírání z generátoru. Začneme s libovolným generátorem vektorového prostoru (například celým vektorovým prostorem U) a budeme z něj postupně odebírat nadbytečné vektory. Skončíme s lineárně nezávislým generátorem, neboli bází.
Problém je, že typicky bude generátor nekonečný i v konečně dimenzionálním vektorovém prostoru. Odebíráme nekonečně mnoho vektorů, navíc můžeme skončit s prázdnou množinou (problém nekonečna). Například v ℝ postupně odebereme všechny vektory přímky, protože každý bude nadbytečný vůči zbývajícím.
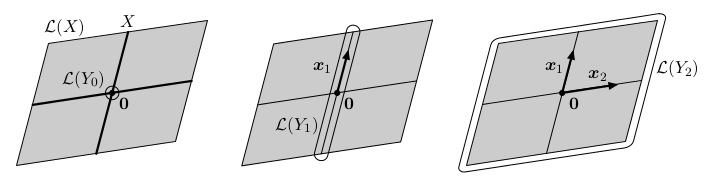
Fungující nápad: přidávání vektorů. Půjdeme na to proto obráceně, začneme s prázdnou množinou a budeme do ní postupně přidávat vektory při zachování lineární nezávislosti.
Nechť Y0 = ∅ a Yk je zkonstruovaná nezávislá množina s k vektory. Skončíme, pokud ⟨Yk⟩ je celý prostor U. Jinak zvolíme libovolný vektor yk+1 ∊ U ∖ ⟨Yk⟩ a pokračujeme dál. Postup skončí po konečně mnoha krocích kvůli předpokladu a zkonstruuje bázi U.
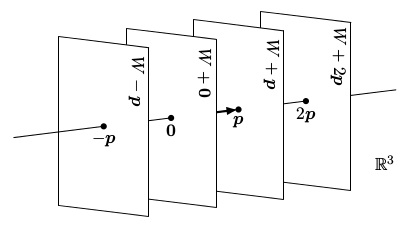
Afinní podprostory jsou zobecněním vektorových podprostorů. Afinní podprostor W+p vznikne z vektorového podprostoru W posunutím z počátku o vektor p:
Navíc uvažujeme i prázdnou množinu jako afinní podprostor. Například afinní podprostory ℝ3 jsou prázdná množina, všechny body, všechny přímky, všechny roviny a celý prostor.
Tvrzení: Platí, že W+p = W+q, právě když p-q ∊ W.
Důkaz: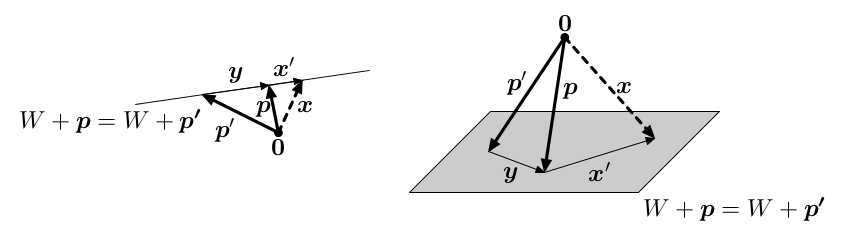
Afinní podprostory jsou velice zajímavé strukturálně, více informací u faktorprostorů.
Tagy: #klicove
Pokud pracujeme s abstraktní definicí vektorového prostoru, máme zaručeno několik vlastností vektorů: sčítání vektorů je komutativní, asociativní, platí distributivity s násobením, existuje nulový vektor, atd.
Pokud použijeme konstruktivní definici ℝn, můžeme snadno dokázat, že vektory také splňují všechny tyto vlastnosti. Například nulový vektor je počátek 0 = (0,...,0).
Ukažme si myšlenku alespoň na jednom příkladu.
Tvrzení: Sčítání vektorů je komutativní, tedy platí u+v = v+u.
Důkaz: Nejprve si uvědomme, že vektory u+v a v+u jsou si rovny, právě když se shodují v každém koeficientu. A protože tyto koeficienty jsou reálná čísla, přenesou se jejich komutativita i na vektory:

Důležité je, že vlastnosti jednodušších struktur se přenášejí o hladinu výše na strukturu, která je obsahuje. Například vektory jsou tvořeny reálnými čísly, které vzniknou z podmnožin racionálních čísel, které vzniknou z dvojic celých čísel, které vzniknou jako dvě kopie přirozených čísel. Tedy to, že vektory jsou komutativní je důsledek toho, že přirozená čísla jsou komutativní.
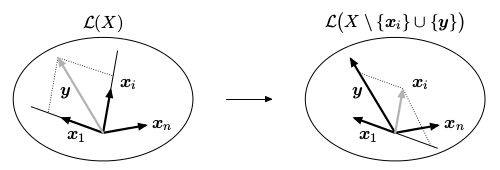
Jednodušší verze Steinitzovy věty. Říká, že je možné nahradit jeden vektor množiny za libovolný nenulový vektor z jejího lineárního obalu.
Lemma: Nechť X je libovolná množina vektorů a y ≠ 0 patří do ⟨X⟩. Potom existuje z∊X takové, že
⟨X \ {z} ∪ {y}⟩ = ⟨X⟩.
Důkaz:
Protože y patří do ⟨X⟩, platí následující:


Afinní podprostory jsou zajímavé strukturálně.
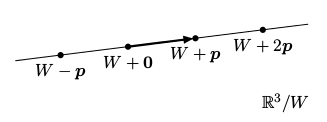
Tvrzení: Množina všech afinní podprostorů vzniklých posunutím W tvoří vektorový prostor.
Důkaz: Stačí definovat vektorové operace: (W+p)+(W+q) = W+(p+q) a c*(W+p) = W+c*p. Rozmyslete si, že splňují definice vektorového prostoru.
Tyto vektorové prostory jsou důležité a říká se jim faktorprostory. Nechť V je vektorový prostor a W je jeho podprostor. Vektorový prostor všech afinních podprostorů vzniklých posunutím W se značí V/W a nazývá se faktorprostor nebo také kvocient.
Tvrzení: Platí, že dim(W)+dim(V/W) = dim(V).
Lineární obal ⟨X⟩ množiny vektorů X je množina všech lineárních kombinací vektorů z X. Podle lemmatu jsou to všechny vektory, které lze získat z X aplikováním konečných posloupností operací. Lineární obal se někdy také značí L(X) nebo span(X). Říkáme, že X generuje ⟨X⟩.
Pozorování: Lineární obal ⟨X⟩ je vektorový podprostor.
Tvrzení:
Lineární obal ⟨X⟩ je nejmenší vektorový podprostor, který obsahuje všechny vektory z X, což je infimum ve svazu podprostorů. Tedy ⟨X⟩ je průnik přes všechny vektorové podprostory, které obsahují X.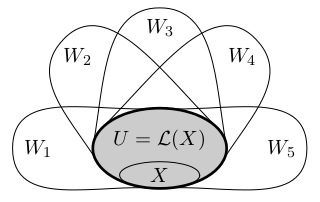
Množina vektorů se nazývá báze, pokud je lineárně nezávislá a generuje celý prostor. Chceme tedy co nejméně vektorů, které umožnují popsat vektorový prostor. Podobně můžeme báze uvažovat i pro libovolný vektorový podprostor.
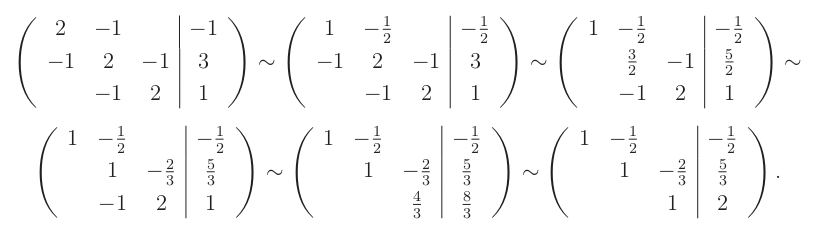
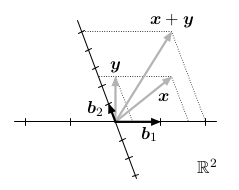
Každá báze b1,...,bn definuje systém souřadnic nad vektorovým prostorem:
Pokud x = c1*b1 + ... + cn*bn, jsou jeho souřadnice (c1,...,cn).
Různé báze definují různé systémy souřadnic. Například pro kanonickou bázi vlevo jsou souřadnice vektoru x rovny (5/2,2), zatímco pro bázi vpravo jsou (8/5,5/2).
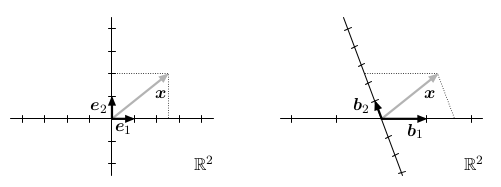
Tvrzení: Pro každý vektor x jsou jeho souřadnice určené jednoznačně.
Tagy: #klicove
Je přirozené se ptát, proč chceme uvažovat různé báze a nevystačíme si s přirozenou kanonickou bází:
Fibonacciho čísla je posloupnost definovaná následující rekurencí:
f0 = 0, f1 = 1 a fn+2 = fn+1 + fn.
Posloupnost je to zajímavá a splňuje řadu pěkných matematických vlastností. S pomocí volby vhodné báze nalezneme následující vzorec pro n-té Fibonacciho číslo:
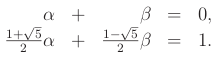
Uvažme prostor všech fibonacciovských posloupností, což jsou posloupnosti splňující rekurenci s libovolnými hodnotami prvních dvou členů (a0, a1). Ty tvoří vektorový prostor dimenze dva. Pro ten chceme najít bázi tvořenou posloupnostmi, pro které bude jednoduchý vzorec pro n-tý člen: an = xn pro nějaké reálné číslo x. Protože taková posloupnost musí splňovat rekurenci, platí xn+2 = xn+1 + xn, neboli x2 = x + 1. Řešením jsou dvě fibonacciovské posloupnosti tvořící bázi prostoru:
Vektorový prostor ℝn je tvořen vektory, které geometricky odpovídají bodům. Vznikne obecněním ℝ2 a ℝ3. Pro ně Deckard vymyslel, že sice prostor přímo nevidíme, ale můžeme v něm popisovat pozici pomocí trojice souřadnic (x,y,z).
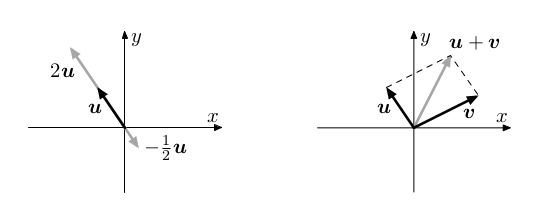
Poznamenejme, že za vektory jsou někdy označovány orientované úsečky. Toto dělení bodů a vektorů je historické a dnes již zbytečné. Někdy s vektorem budeme pracovat jako s bodem, jindy se nám bude hodit interpretace, že je to šipka vycházející z počátku do tohoto bodu.
Násobení skalárem odpovídá natažení vektoru v daném směru. Pokud je koeficient záporný, bude výsledný vektor ukazovat opačným směrem.
Motivace pro sčítání dvou vektorů vychází z fyziky, konkrétně z Newtonovské mechaniky. Pokud vektory reprezentují působení síly (ta má velikost a směr), tak sčítání reprezentuje skládání těchto sil, tedy určení jedné zkombinované síly.
Vektorový podprostor W je neprázdná množina vektorů uzavřená na operace. To přesně znamená, že kdykoliv u a v patří do W, patří tam také u+v a c*u pro libovolné c. Speciálně počátek 0 vždy patří do W.
Studovat vektorové podprostory je užitečné ze dvou důvodů:
Uvažme všechny vektorové podprostory uspořádané inkluzí. Například pro ℝ3 získáme níže uvedený Hasseho diagram:
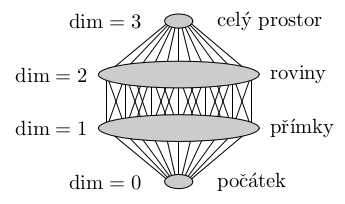
Tvrzení: Vektorové podprostory P tvoří úplný svaz, což znamená, že pro libovolnou podmnožinu vektorových prostorů S existuje infimum a supremum. Infimum je průnik všech podprostorů v S, kde průnik přes prázdnou podmnožinu je celý prostor. Supremum se definuje jako infimum všech podprostorů, které obsahují všechny podprostory v S, tedy jako jejich průnik.
Pokud vám definice suprema pomocí infima připadá podivná, rozmyslete si, že obecně stačí ukázat existenci pouze infim, nebo pouze suprem, existence toho druhého automaticky vyplývá.
Tagy: #klicove
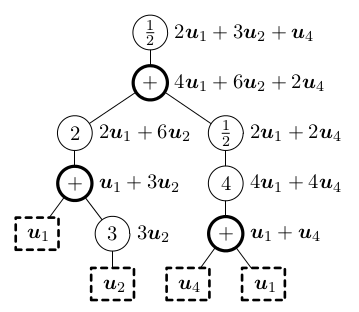
Výraz c1*x1 + ⋯ + cn*xn se nazývá lineární kombinace vektorů x1,...,xn.
Zároveň se výsledný vektor nazývá lineární kombinace.
Motivace pro studium lineárních kombinací je, že to jsou univerzální operace s vektory:
Tvrzení: Libovolná konečná posloupnost operací je ekvivalentní nějaké lineární kombinaci.

Mějme soustavu m rovnic o n neznámých. Jednotlivá ohodnocení neznámých můžeme identifikovat s vektory ℝn.
Jak vypadá množina všech řešení geometricky? Můžeme postupovat tak, že určíme množinu řešení Ri pro každý z řádků i=1,...,m. Celá množina řešení soustavy je průnik R1 ∩ ⋯ ∩ Rm.
Příklady soustav 2 rovnic o 2 neznámých:
Jak vypadá množina Ri obecně?
Povšimněme si, že hodnoty libovolných n-1 proměnných můžeme zvolit libovolně, čímž je hodnota zbývající proměnné jednoznacně určena.
Tedy Ri má n-1 "stupňů volnosti".
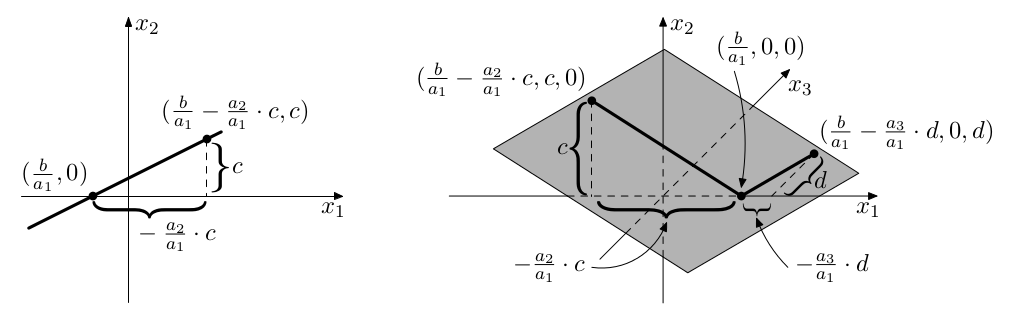
Geometricky Ri tvoří nadrovinu posunutou z počátku, což je afinní podprostor dimenze n-1, zobecnění rovin v ℝ3. Koeficienty ai,1,...,ai,n určují směr normálového vektoru, který je kolmý k nadrovině. Koeficient bi určuje posunutí nadroviny z počátku.
Abychom toto mohli dokázat, museli bychom mít jinou geometrickou definici nadroviny.
Zkuste si však rozmyslet, že to tak funguje pro malé hodnoty n. Konkrétně pro n=2 (vlevo) dostaneme přímku posunutou z počátku, pro n=3 (vpravo) získáme rovinu posunutou z počátku.
Tagy: #klicove
Jeden z pohledů na lineární algebru je ten, že je to studium vektorových prostorů a jejich transformací (lineární zobrazení). Vektorové prostory jsou proto jedny z nejzákladnějších struktur v matematice. Jsou tvořené body, které se nazývají vektory, a tyto vektory umíme aplikovat dvě operace: sčítání a násobení skalárem.
Jsou dva možné přístupy, jak lze vektorový prostor definovat. (A ty obecně odpovídají dvěma rozdílným přístupům, jak lze v matematice popisovat objekty.) První je konstrukcí, kdy přesně specifikujeme, co jsou vektory a jak se na ně aplikují operace. Druhý abstraktní postup je přes popis vlastností. Řekneme, že vektorový prostor je tvořen nějakou množinou vektorů spolu s operacemi, které splňují daný seznam vlastností.
Jsou dva možné způsoby, jak lze definovat vektorový prostor.
Konkrétní konstrukce:
Vektorový prostor ℝn je tvořen n-ticemi x = (x1,...,xn), zvanými vektory, spolu s operacemi sčítání a násobení skalárem definovaných po složkách:
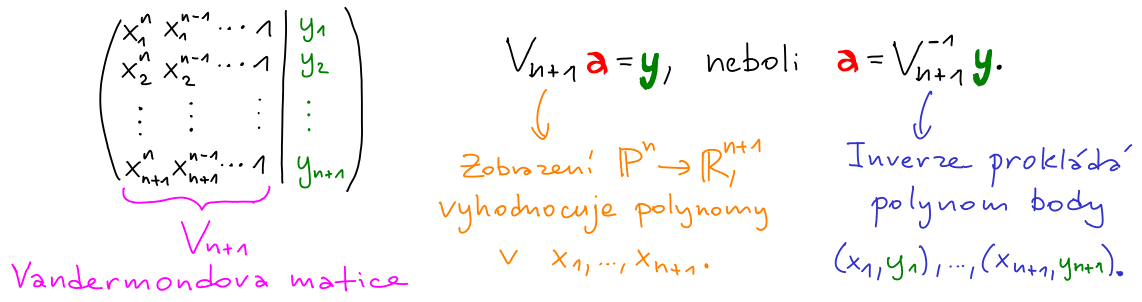
K vyřešení interpolace chceme najít vektor koeficientů a na prostoru polynomů ℙn stupně nejvýše n. Najít jeho souřadnice vůči kanonické bázi je obtížné a vede to řešení soustavy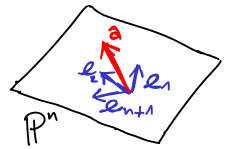
Lagrangeova interpolace je založena na myšlence, že problém se stane velice jednoduchý při volbě vhodné báze ℓ1, ..., ℓn+1.
Bázi ℓ1, ..., ℓn+1 zvolíme, aby každý z vektorů ℓi interpoloval jeden z bodů (xi, yi). Jejich jednoduchou lineární kombinací získáme hledaný vektor a.
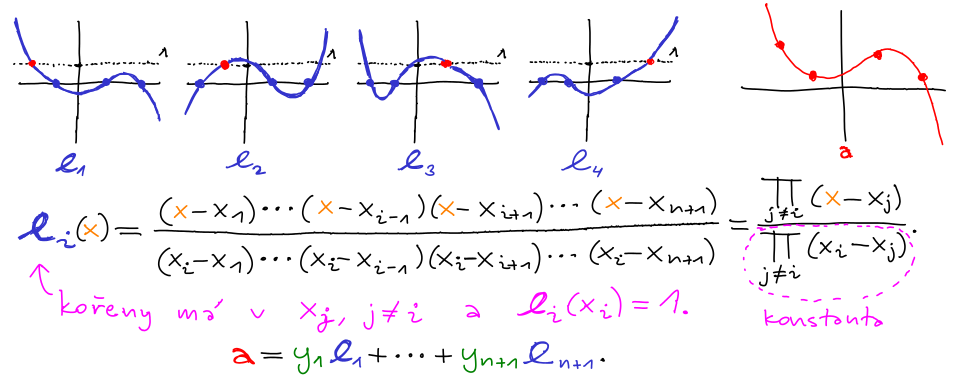
Samozřejmě je možné volit i jiné báze. Jedním příkladem je Newtonova interpolace, vůči bázi n1, ..., nn+1. Ta funguje skvěle na přidávání dalších bodů, neboť vektor ni závisí pouze na bodech (x1,y1), ..., (xi,yi).
Řada geometrických zobrazení f : ℝ2 ⟶ ℝ2 splňuje linearitu:
Natažení: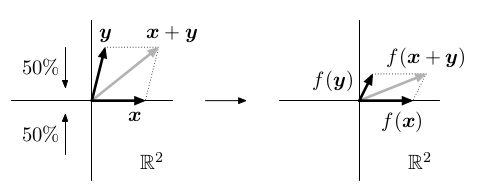 Rotace: 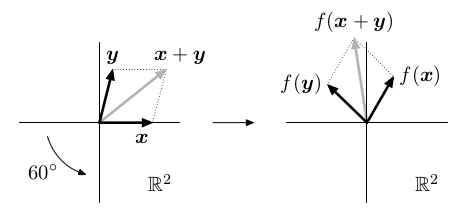 | Zkosení: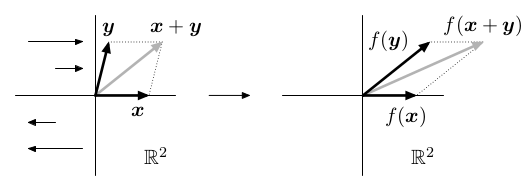 Kolmá projekce: 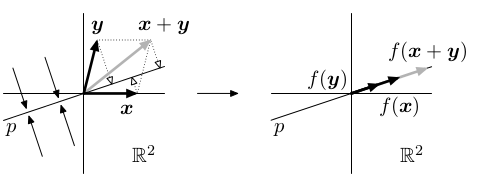 |
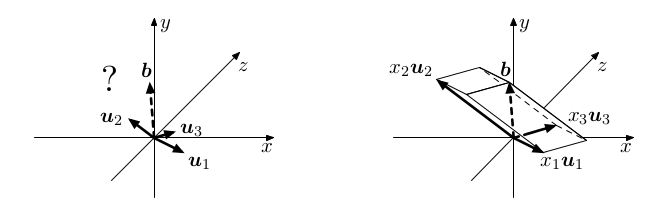
Řádkové úpravy z pohledu sloupcové interpretace:
Řádkové úpravy transformují prostor ℝm spolu s vektory u1,...,un a pravou stranou b. Klíčová vlastnost je, že pokud úprava prostor nikde nesplácne (tedy je regulární), je vztah mezi u1,...,un a pravou stranou b zachován.
Elementární řádkové úpravy odpovídají následujícím geometrickým transformacím prostoru ℝm:
Sloupcové úpravy z pohledu sloupcové interpretace:
Sloupcová úprava transformuje jednotlivé sloupcové vektory u1,...,un. Jejich vztah k pravé straně b se může změnit, tedy mění se množina všech řešení. Je možné provádět sloupcové úpravy, ale musíme si je zapamatovat a na závěr příslušně upravit nalezené řešení.
Elementární sloupcové úpravy odpovídají následujícím transformacím:
Věta: Množina všech řešení soustavy Ax=0 je vektorový podprostor, který se značí Ker(A).
Důkaz: Stačí ukázat, že množina všech řešení je uzavřená na sčítání a násobení skalárem. Když x je řešením soustavy Ax=0, platí pro i-tou rovnici:
Množina řešení je uzavřená na sčítání, neboť se zachovává se splnění i-té rovnice:
Důkaz uzavřenosti na násobení je podobný.
V maticovém zápisu je to ještě jednodušší. Pokud Ax=0 a Ay=0, potom
A(c*x) = c*(Ax)=c*0=0 a A(x+y) = Ax+Ay = 0+0 = 0.
Věta: Množina všech řešení soustavy Ax=b je afinní podprostor Ker(A)+p, kde p je libovolné řešení soustavy.
Důkaz: Stačí si všimnout, že kdykoliv máme dvě řešení Ax=b a Ay=b, jejich rozdíl x-y patří do Ker(A):
A(x-y) = Ax-Ay = b-b = 0.
Zbytek plyne z vlastností afinních podprostorů.
Klíčový důsledek: Uvažme různé pravé strany b. Pro některé nebude existovat žádné řešení, což odpovídá neexistence vektoru p. Pro ty zbývající jsou to afinní podprostor vzniklé různými posunutími Ker(A). Tedy množiny řešení soustav Ax=b a Ax=c mají totožnou strukturu až na posunutí.
Označíme Im(A) množinu všech pravých stran, pro kterou existuje řešení, to je vektorový podprostor
ℝm (neboť afinní podprostory vzniklé posunutím W tvoří vektorový prostor). Platí, že čím větší je Ker(A), tím méně jeho posunutí existuje, tedy tím méně pravých stran má řešení. Tento vztah lze přesně popsat pomocí dimenzí:
dim Ker(A) + dim Im(A) = n.
Tagy: #klicove
I když se tato interpretace často ignoruje, považuji ji za mnohem užitečnější než tu řádkovou. Myšlenka je, že budeme uvažovat sloupcové vektory matice a pravé strany, které patří do ℝm:

Tedy máme rovnici
Tagy: #klicove
Soustavami lineárních rovnic lze rešit problém, který s nimi na první pohled vůbec nesouvisí. Uvažme polynomy
P(x) = an*xn + an-1*xn-1 + ⋯ + a1*x + a0.
stupně n. Platí následující algebraická věta, úzce související s fundamentální větou algebry.
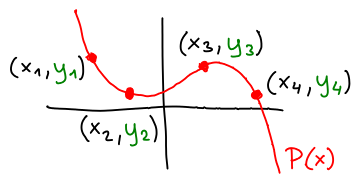
(x1,y1), ..., (xn+1,yn+1),
kde xi ≠ xj pro i ≠ j, tedy P(xi) = yi.
Hledání koeficientů tohoto polynomu se nazývá interpolace polynomů a je možné to udělat vyřešením soustavy lineárních rovnic.
K nalezení koeficientů stačí vyřešit následující soustavu, kde y = (y1, ..., yn+1) a vektor a je vektor hledaných koeficientů polynomu P(x).
Větu o jednoznačnosti interpolace je možné dokázat pomocí lineární algebry. Stačí dokázat, že Vandermondova matice Vn+1 je regulární, právě když xi ≠ xj pro i ≠ j. Jiný důkaz vyplývá z Lagrangeovy interpolace.
Věta:
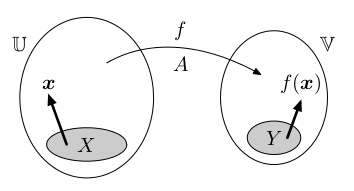
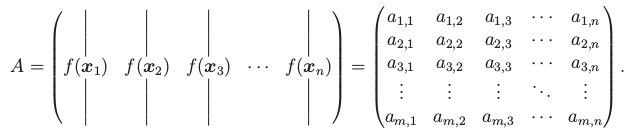
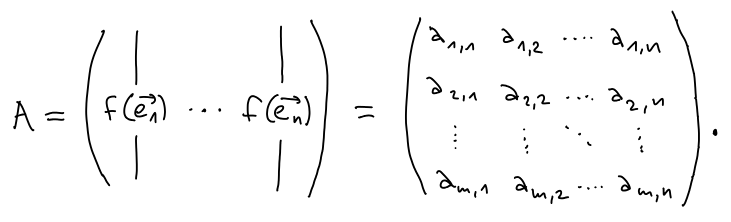
Libovolné lineární zobrazení f : U ⟶ V je reprezentováno maticí tak, že f : x ↦ Ax, tedy f(x) = Ax.
Důkaz: Zobrazení x ↦ Ax je vždy lineární zobrazení z distributivity maticového násobení: A(x+y) = Ax + Ay a A(c*x) = c*(Ax).
Na druhou stranu, zobrazení f : ℝn ⟶ ℝm je z linearity jednoznačně popsané obrazy f(e1), ..., f(en):
Pro x = (x1, ..., xn) = x1*e1 + ⋯ + xn*en je f(x) = x1*f(e1) + ⋯ + xn*f(en).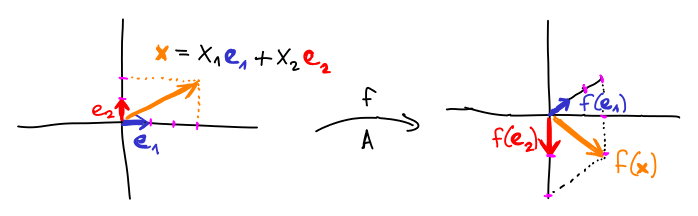
Víme, že lineární zobrazení f : U ⟶ V je jednoznačně určeno obrazy libovolné báze. Zvolíme libovolně dvě báze:
K popisu zobrazení stačí znát f(x1),...,f(xn), kde každý z těchto obrazů lze popsat pomocí m souřadnic vůči bázi Y.
Rozhodneme se zapsat těchto m x n souřadnic do tabulky A, které budeme říkat matice. Souřadnice jednotlivých vektorů f(xi) zapíšeme do sloupců:
Tedy ai,j je souřadnice f(xj) vůči yi.
Věta: Nechť A je maticová reprezentace f a nechť x je vyjádřený vůči bázi X. Potom jsou souřadnice f(x) vůči bázi Y ve vektoru Ax. Tedy f : x ↦ Ax.
Klíčové: Pro různé volby bází X a Y můžeme získat různé maticové reprezentace lineárního zobrazení f. Naopak jedna matice může reprezentovat různá lineární zobrazení pro různou volbu bází.
Například uvažme rotaci o úhel 𝜑 v rovině. Ta je reprezentovaná maticí A, pokud X=Y je kanonická báze tvořená vektory (1,0) a (0,1). Pokud však X je kanonická báze a Y je X otočená o úhel 𝜑, je rotace reprezentovaná maticí B. Na druhou stranu, pokud X=Y a zobrazení je endomorfismus, reprezentuje matice B identické zobrazení.
Tagy: #klicove
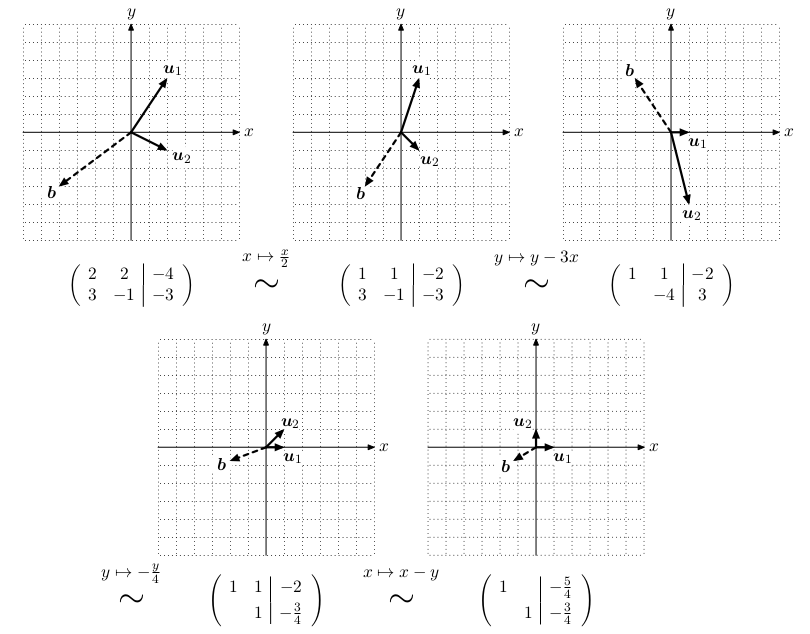
Gaussova eliminace provádí geometrické transformace sloupcových vektorů a pravé strany elementárními řádkovými úpravami. Převede soustavu do odstupňovaného tvaru se sloupcovými vektory u1,...,un a pravou stranou b, ve kterém je snadné ji vyřešit.
Pokud b ukazuje jiným směrem než sloupcové vektory, poznáme to podle toho, že ukazuje ve směru souřadné osy, která není obsažena v žádném ze sloupcových vektorů u1,...,un. Tedy b nelze vyjádřit pomocí sloupcových vektorů u1,...,un a řešení soustavy neexistuje.
Pokud jsou všechny tyto koeficienty b nulové, řešení existuje. Najdeme ho tak, že hodnoty volných proměnných zvolíme libovolně, čímž známe natažení příslušných sloupcových vektorů. Můžeme je odečíst od pravé strany a získat upravenou pravou stranu b'. Pro sloupcové vektory s pivoty dopočteme hodnotu řešení, protože vždy pouze jeden z nich ukazuje určitým směrem b', tedy jeho hodnota natažení je jednoznačně určena a lze příslušný sloupcový vektor odečíst.
Věta: Pro libovolné lineární zobrazení f : U ⟶ V platí, že
U / Ker(f) ≅ Im(f).
Víme, že vzorem jednotlivých vektorů z Im(f) jsou afinní podprostory U vzniklé posunutím Ker(f). Tedy vzory jednotlivých vektorů z Im(f) mají stejnou strukturu až na posunutí.
Platí, že čím větší je Ker(f), tím méně jeho posunutí existuje, tedy tím méně vzorů má řešení. Přesněji, ve řeči dimenzí:
dim Ker(f) + dim Im(f) = dim(U).
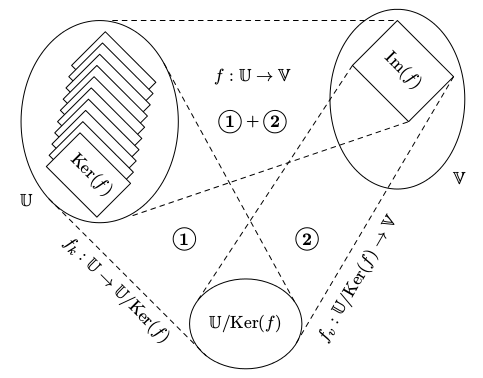
Podle věty lze homomorfismus f : U ⟶ V rozdělit na složení dvou jednodušších homomorfismů:
Můžeme zjednodušit zápis soustavy tak, že vynecháme zbytečné informace:
Původní soustava: | Maticový zápis: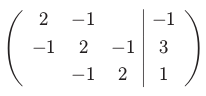 |
Soustavu lze v řeči matic a vektorů vyjádřit v elegatní formě Ax=b. Zde A je matice koeficentů, x je vektor neznámých a b je vektor pravých stran.
Rozepsáním definice maticového násobení získáme soustavu lineárních rovnic.
Interpretace maticového násobení po sloupcích A vede na sloupcovou interpretaci soustavy.
Tagy: #klicove
Věta: Libovolný vektorový prostor V dimenze n je izomorfní vektorovému prostoru ℝn.
Slovo izomorfní znamená, že existuje izomorfismus f : V ⟶ ℝn. Ten zaručuje, že algebraická struktura prostorů V a ℝn je totožná, tedy struktura jejich operací. Platí f(x+y) = f(x)+f(y), podobně pro násobení, tedy jednotlivé vektory x prostoru V lze identifikovat s vektory f(x) prostoru ℝn.
Neznamená to, že by tyto prostory byly totožné, například V může být prostor polynomů stupně nejvýše n-1, a tedy jeho prvky jsou úplně jiné matematické objekty než n-tice reálných čísel. Avšak izomorfismus říká, že v řadě situací můžeme pracovat s V přesně jako s ℝn, například lze řešit soustavy nad ℝn místo nad abstraktním prostorem V.
Důkaz: Zvolíme libovolnou bázi prostoru V. Ta definuje souřadnice (c1,...cn) nad V. Tato definice souřadnic je hledaný izomorfismus:
f : c1*b1 + ... + cn*bn ⟼ (c1,...,cn).
Protože souřadnice jsou definované pro každý vektor V jednoznačně, je definované zobrazení bijekce. Zbývá ověřit, že to skutečně je lineární zobrazení. Stačí si všimnout, že sčítání vektorů ve V odpovídá sčítání jejich souřadnic, podobně pro skalární násobení.
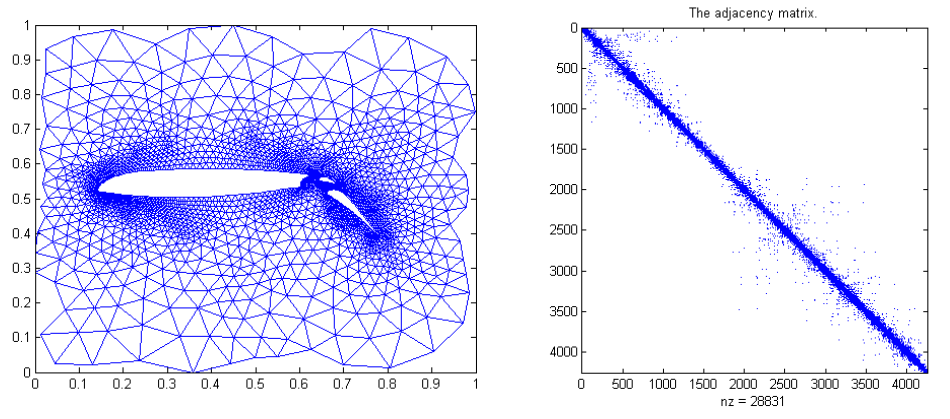
Velká část matematiky se zabývá studiem modelů reálného světa. To jsou často dynamické systémy, jejichž stav (například vektor reálných čísel) se mění v závislosti na čase. Změna stavu je popsána matematickými vztahy, například lokálně diferenciálními rovnicemi. Při analýze chceme odpovídat na otázky následujícího typu: predikce vývoje z počátečního stavu, pochopit kvalitativní chování (konvergence k ustálenému stavu, oscilace, chaotické chování).
Problém je, že typický dynamický systém je příliš složitý a nemůže být přesně popsán jeho vývoj. Ve většině situací se spokojíme s tím, že nalezneme přibližné řešení jeho diskretizací (simulace, metoda konečné mřížky, metoda konečných prvků), čímž se v řadě situací převede na řešení velké soustavy lineárních rovnic
Ax=b.
Zde matice A popisuje zdiskretizované vztahy v systému, zatímco vektor b odpovídá stavu nebo vývoji stavu. Při řešení se často využívá specifické struktury koeficientů matice A.
Řešení soustav lineárních rovnic je odvěký problém se spoustou aplikací. Konkrétní soustavy lineárních rovnic se v matematice objevují již před více než pěti tisíci lety. V čínské knize Devět kapitol napsané zhruba dvě stě let před naším letopočtem se objevuje postup, jak vyřešit konkrétní soustavu tří lineárních rovnic o třech neznámých. Jakékoliv formální zdůvodnění chybí, ale při zobecnění dostaneme Gaussovu eliminaci.
V západní matematice Gaussovu eliminaci poprvé popsal Newton ve své algebraické knize, i když se jednalo o postup mezi matematiky běžně známý.
Gauss se zabýval metodou nejmenších čtverců (v souvislosti s geodézií), pro níž popsal algoritmus podobný Gaussově eliminaci. Jméno Gaussova eliminace se začalo používat až v padesátých letech díky implementaci metody nejmenších čtverců v počítačích. Historie řady pojmů lineární algebry je značně složitá!
Čtvercová matice se nazývá regulární, pokud je invertovatelná. Ostatní čtvercové matice se nazývají singulární. O inverzích regulárních matic platí následující věta:
Věta: Pro čtvercovou matici existuje levá inverze, právě když existuje pravá inverze. Navíc jsou stejné a určené jednoznačně.
Těžká je první část, která je speciální případ rovnosti rank(A) = rank(AT). Druhá část snadno vyplývá z asociativity. Pokud X je levá inverze a Y je pravá inverze, platí:
X = XIm = X(AY) = (XA)Y = InY = Y.
Tagy: #klicove
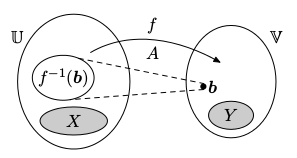
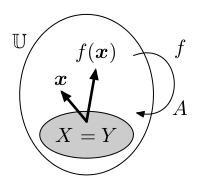
Nechť f : U ⟶ V je lineární zobrazení a b je libovolný vektor V. Chceme nalézt množinu vzorů
f-1(b) = {x : f(x) = b}.
Nechť lineární zobrazení f je reprezentováno maticí A. Víme, že f : x ↦ Ax. Tedy hledáme všechny vektory x, které splňují Ax = b, což vede na soustavu lineárních rovnic. Tedy i kdybychom lineární algebru budovali abstraktně, od vektorových prostorů a jejich homomorfismů, je řešení soustav lineárních rovnic klíčové.
Víme, že množina vzorů f-1(b) je neprázdná, právě když b ∊ Im(f). V takovém případě je to afinní podprostor Ker(f)+p, kde p je libovolný vzor b.
Tagy: #klicove
Nechť U a V jsou dva vektorové prostory.
Zobrazení f : U ⟶ V je lineární, pokud splňuje:
Lineární zobrazení se nazývají homomorfismy.
Homomorfismy se uvažují nad obecnými matematickými strukturami a jejich zkoumání je velice důležité.
Název se skláda z homo (zachovávání struktury) a morfismus (transformace jedné struktury v druhou).
Učiňme nejprve pozorování, že pro libovolné lineární zobrazení f platí, že f(0) = 0. Obrazem počátku musí být počátek z linearity:
f(0) = f(0*0) = 0*f(0) = 0.
Podobně platí následující:
Tvrzení: Obrazem libovolné lineární kombinace je lineární kombinace obrazů. Proto je lineární zobrazení jednoznačně určené obrazy libovolné báze.
Důkaz: Využijeme linearitu:
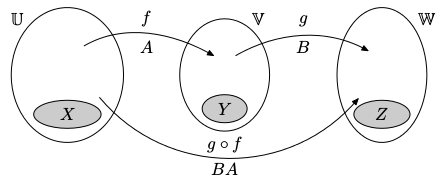
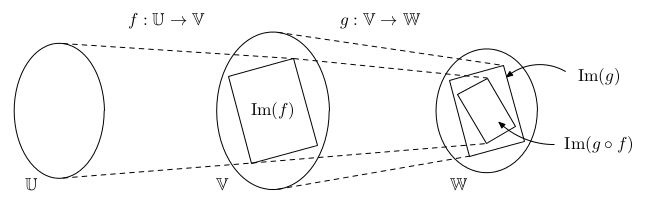
Mějme lineární zobrazení f : U ⟶ V a g : V ⟶ W. Existuje složené zobrazení g ∘ f : U ⟶ W, které je také lineární. Jak vypadá jeho maticová reprezentace?
Věta: Nechť
A reprezentuje f : U ⟶ V vůči bázím X a Y,B reprezentuje g : V ⟶ W vůči bázím Y a Z.
Potom
BA reprezentuje g ∘ f : U ⟶ W vůči bázím X a Z.
Tato věta vysvětluje definici maticového násobení. Matice musíme násobit tak zvláštně právě proto, aby jejich násobení odpovídalo skládání lineárních zobrazení. Pokud bychom lineární algebru budovali od lineárních zobrazení, můžeme z definice maticové reprezentace odvodit definici maticového násobení.
Proto také definice maticového násobení vyžaduje kompatibilní rozměry. Nechť A je velikosti n x p, reprezentující zobrazení ℝp ⟶ ℝn, a B je velikosti m x n, reprezentující zobrazení ℝn ⟶ ℝm. Potom je prostor uprostřed totožný, tedy má i stejnou dimenzi, a složené zobrazení ℝp ⟶ ℝm je reprezentováno maticí BA velikosti m x p.
Důkaz z definice: Matice reprezentující g ∘ f vůči bázím X a Z musí mít v i-tém sloupci souřadnice g(f(xi)) vůči bázi Z. Povšimneme si, že v i-tém sloupci matice A máme souřadnice f(xi) vůči bázi Y, a obrazy jednotlivých vektorů báze Y jsou ve sloupcích B. Tedy souřadnice g(f(xi)) vůči bázi Z získáme jako zkombinování sloupců B podle souřadnic v i-tém sloupci A, což přesně odpovídá maticovému násobení.
Důkaz z asociativity: Z asociativity maticového násobení víme, že (BA)x = B(Ax) pro libovolný vektor x. Pravá strana odpovída složenému zobrazení g ∘ f : x ↦ B(Ax). Protože rovnost platí pro libovolný vektor x, musí být g ∘ f reprezentováno BA.
Poznamenejme, že naopak z této věty vyplývá asociativita maticového násobení. To totiž odpovídá skládání lineárních zobrazení, a skládání libovolných zobrazení je asociativní.
Tagy: #klicove
Čtvercová regulární matice reprezentující identitu se nazývá matice přechodu. Přepočítává souřadnice od jedné báze X k jiné bázi X'.
Čtvercová regulární matice může reprezentovat různá lineární zobrazení. Pokud zvolíme jednu bázi X, dostáváme nějaký endomorfismus. Lze ji však uvažovat jako reprezentace identity vůči volbě bází X a X'.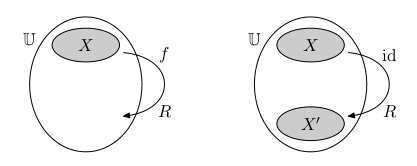
Dopředná eliminace:
Zpětná substituce:

Má nekonečně mnoho řešení ve tvaru (3-2y,y), kde y je libovolné reálné číslo. Lze popsat také jako (3,0) + y*(-2,1).
Soustava vpravo:
Neexistuje žádné řešení, neboť jsme úpravami odvodili, že musí platit 0x+0y=2, což není splněno pro žádnou dvojici (x,y) reálných čísel.
Algoritmus na řešení soustavy lineárních rovnic. Jedná se o strategii, jak aplikovat elementární úpravy tak, aby se matice zjednodušila do odstupňovaného tvaru.
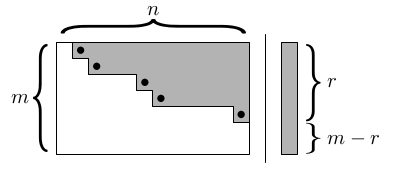
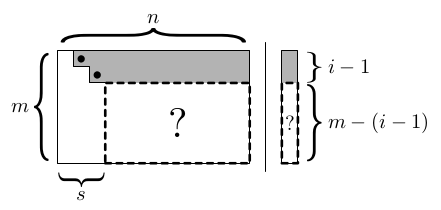
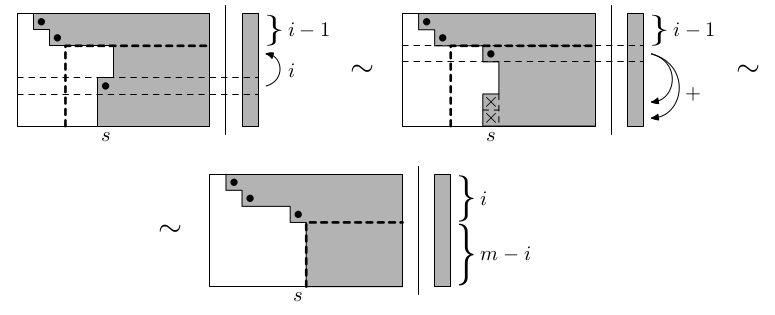
Černě vyznačené koeficienty se nazývají pivoti a jsou to první nenulové hodnoty na jednotlivých řádcích. Gaussova eliminace se skládá ze dvou fází:
Odstupňovaný tvar je konstruován v n krocích, celkově k jeho spočítání potřebujeme n3/3 elementárních operací (násobení, sčítání).
Stav na počátku i-tého kroku:
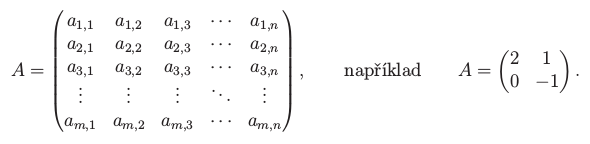
Matice je tabulka m x n reálných čísel:
Matice velikosti m x n popisuje geometrickou transformaci vektorového prostoru ℝn do vektorového prostoru ℝm.
Pro matici A označme (A)i,j = ai,j koeficient v i-tém řádku a j-tém sloupci. Řádky matice tvoří řádkové vektory ℝn, sloupce tvoří sloupcové vektory ℝm.
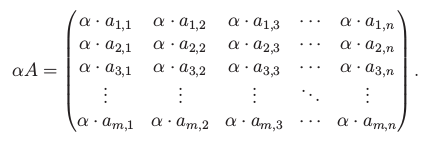
Základní maticové operace jsou násobení skalárem a sčítání: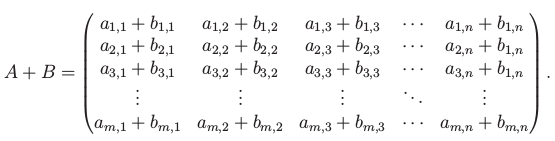
Tagy: #klicove
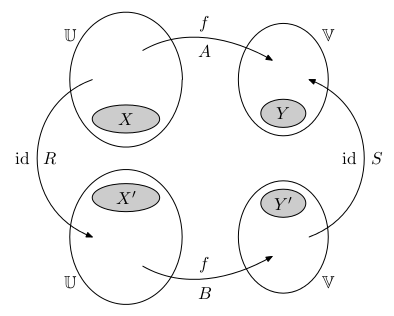
Dvě matice A a B jsou ekvivalentní, pokud reprezentují stejné lineární zobrazení pro různou volbu bází. Jsou ekvivalentní, právě když existují dvě regulární matice R a S (přechodu), pro které platí:
A = SBR, neboli B = S-1AR-1.
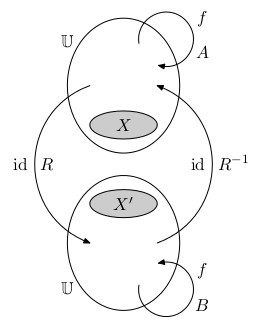
Podobnost je maticová ekvivalence pro čtvercové matice reprezentující endomorfismy vůči jedné bázi. Tedy dvě matice A a B jsou podobné, právě když reprezentují stejný endomorfismus pro jinou volbu báze. To je právě tehdy, když existuje regulární matice R (matice přechodu), že platí:
A = R-1BR, neboli B=RAR-1.
Regulární úpravy odpovídají regulárním maticím.
Soustava Ax=b se upraví na soustavu RAx=Rb, kde R je nějaká regulární matice.
Tvrzení: Pokud R je regulární matice, je množina řešení Ax=b a RAx=Rb je stejná.
Důkaz:
Pokud x řeší původní soustavu, určitě také řeší upravenou soustavu. Tedy množina řešení se může každou úpravou pouze zvětšit. Protože je R regulární, existuje inverzní úprava R-1, která převede upravenou soustavu zpět do původního stavu:
R-1RAx = R-1Rb ⟹ Ax = b.
Proto musí být množina řešení stejná, jinak by se úpravou R-1 zmenšila, což není možné.
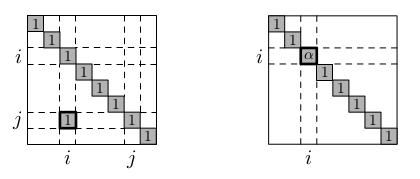
Regulární matice R elementárních řádkových úprav jsou velice jednoduché. Vlevo je přičtení i-tého řádku k j-tému. Vpravo je vynásobení i-tého řádku koeficientem 𝛼 ≠ 0.
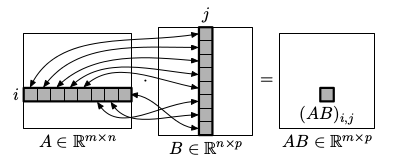
Nechť A∊ℝm x n a B∊ℝn x p. Potom je součin AB matice velikosti m x p s následujícími koeficienty:
Příklad maticového součinu: (vlevo A, nahoře B)
Toto je pohled řádek-sloupec na maticové násobení. Existují však ještě tři další užitečné pohledy:
Používají se tři prefixy pro speciální druhy homorofismů: endomorfismy, izomorfismy a automorfismy. Ty rozlišují jestli je f zobrazení obecné nebo bijektivní, a jestli f zobrazuje mezi dvěma prostory U a V, nebo z prostoru U do téhož prostoru U.
| f : U ⟶ V | f : U ⟶ U | |
| obecně | homomorfismus | endomorfismus |
| f je bijekce | izomorfismus | automorfismus |
fk = f ∘ f ∘ ⋯ ∘ f.
Endomorfismy jsou reprezentované čtvercovými maticemi a typicky se volí pouze jedna báze, tedy X=Y. Výhody takových reprezentací jsou, že iterování homomorfismu odpovídá mocninám reprezentující matice:
Pokud f je reprezentováno A, je fk reprezentováno Ak.
Izomorfismy jsou reprezentované regulárními maticemi. Pokud existuje izomorfismus f : U ⟶ V, mají prostory U a V stejnou algebraickou strukturu vektorových operací + a *. Protože f je bijekce, můžeme vektory U spárovat s vektory V, a operace se na nich aplikují identicky. Neznamená to, že by tyto prostory byly totožné matematické objekty, akorát jejich algebraická struktura je totožná a v řadě případů můžeme pracovat v U stejně jako ve V.
Tagy: #klicove
Obecně existují v matematice dva druhy výpočetních metod. Přímé metody (například Gaussova eliminace) provádějí dlouhou sekvenci kroků, na jejichž koncí získáme řešení. Oproti tomu iterační metody postupují v kratších krocích a konstruují lepší a lepší aproximaci řešení.
V případě soustavy Ax=b počítají iterační metody posloupnost přibližných řešení x0,...,xk. Skončíme v k-tém kroku, když je chyba ek=x-xk dostatečně malá. Protože typicky vektor chyby ek neznáme, testujeme dostatečně malou velikost residua
rk = Aek = A(x-xk) = b - Axk.
Jeden ze zásadních rozdílů je, že pokud iterační metodu zastavíme v půlce, získáme alespoň nějaký odhad řešení, narozdíl od přímé metody. (Co víme o řešení soustavy, pokud Gaussova eliminace spočítá pouze polovinu odstupňovaného tvaru?)
Štěpící metody. Předpokládejme, že A = S - T a že pro matici S umíme snadno vyřešit soustavu (řekněme, že známe S-1). Potom Ax=b vede na Sx=Tx+b, neboli x=S-1Tx+S-1b. Tento vzorec můžeme použít k iterování:
xk+1 = S-1Txk+S-1b.
Metoda konverguje pouze pro určité volby matic S a T, a velice pomalu. Typická volba S je diagonální část A nebo horní trojúhelníková část A. Jiný pohled na metody je, že S je aproximace matice A.
Metoda konjugovaných gradientů CG. Konstruuje postupně aproximace výpočtem Krylovova podprostoru
Kk = ⟨b, Ab, A2b, ..., Ak-1b⟩.
Volíme xk∊Kk tak, aby minimalizovalo chybu řešení přes všechny vektory Kk, což lze udělat velice efektivně. Pro rozšíření Krylovova podprostoru je potřeba vynásobit vektor maticí, což vyžaduje n2 operací. Protože typicky stačí udělat n1/2 iterací, je metoda typicky rychlejší než Gaussova eliminace: n5/2 operací.
Následující věta je jedním z divů lineární algebry. Říká, že pro libovolnou matici A je dim Im(A) = dim R(A), přestože se jedná o zcela jiné prostory.
Věta: Pro libovolnou matici A platí, že rank(A) = rank(AT).
Mějme matici A velikosti m x n. Pokud existuje matice A-1 velikosti n x m splňující AA-1 = Im, nazývá se A-1 pravá inverze A. Nemusí být určena jednoznačně. Podobně se definuje levá inverze A-1, která splňuje A-1A = In.
Označme u1,...,um sloupce pravé inverze A-1. Musí splňovat soustavy
Uveďme několik tvrzení o existence inverzí, čtenář si může rozmyslet jejich důkazy:
Tvrzení: Pro matici A existuje pravá inverze, právě když má soustava Ax=b řešení pro každou pravou stranu b. Neboli Im(A) je celý prostor ℝm.
Tvrzení: Nechť A je matice velikosti m x n. Pokud existuje pravá inverze, je m≤n. Pokud existuje levá inverze, je m≥n. Tedy oboustranná inverze může existovat pouze pro čtvercové matice.
Tvrzení: Pro matici A existuje pravá inverze, právě když existuje levá inverze pro matici AT.
Tvrzení: Matice A velikosti m x n má pravou inverzi, právě když rank(A)=m, a levou, právě když rank(A)=n. (To vychází z netriviálního faktu, že rank(A) = rank(AT).)
Úprava inverzní maticí: Pokud má matice A levou inverzi, můžeme provést úpravu Ax=b na A-1Ax=A-1b, neboli x=A-1b. Nepoužívá se při výpočtech, protože spočítat inverzní matici je složitější než vyřešit soustavu; avšak hodí se v teorii.
Tagy: #klicove
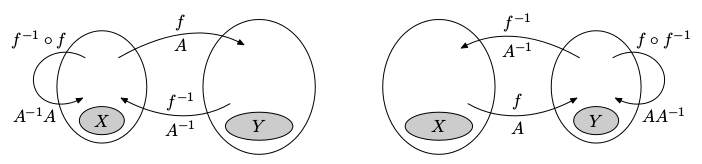
Pro lineární zobrazení f : U ⟶ V může existovat inverzní zobrazení f-1 : V ⟶ U, nebo nemusí. Rozlišujeme tyto druhy inverzí:
Protože identita je reprezentováná jednotkovou maticí In, je inverzní zobrazení reprezentováno inverzní maticí. Přesněji řečeno, nechť f je reprezentováno maticí A vůči bázím X a Y.
 Tagy: #klicove
Tagy: #klicove
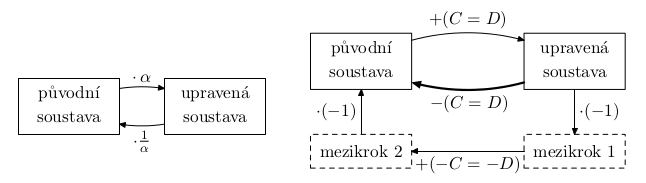
Z rovnic lze vyvozovat nové informace jejich kombinováním. Budeme uvažovat dvě elementární operace a jejich kombinace:
Pokud nějaká n-tice (x1,...,xn) řeší soustavu, bude řešit i upravenou soustavu. Avšak obrácená implikace nemusí platit, množina řešení se může úpravou zvětšit.
Úprava se nazývá regulární (nebo ekvivalentní), pokud nemění množinu řešení obecně libovolné soustavy.
Tvrzení: Úpravy vynásobení nenulovým reálným číslem, přičtení jedné rovnice k druhé a jejich kombinace jsou regulární.
Důkaz: Výše uvedené úpravy lze invertovat, tedy existují úpravy, které převedou upravenou soustavu zpět do původního tvaru. Protože se množina řešení může pouze zvětšovat, nemohla se změnit.
Tagy: #klicove
Věta: Pro libovolnou matici A velikosti m x n existuje dekompozice PA = LU, kde
 Získáváme následující LU a LDU dekompozice pro P=I3:
Získáváme následující LU a LDU dekompozice pro P=I3:
LU dekompozice je maticový zápis Gaussovy eliminace aplikované na A. Význam jednotlivých matic v dekompozici je následující:
Hodnost matice A se značí rank(A) a udává, jak moc je matice A blízká regulární matici. Několik ekvivalentních definic rank(A):
Pro hodnost platí následující horní odhady:
 Tvrzení: Násobení regulární maticí zleva/zprava nemění hodnost.
Tvrzení: Násobení regulární maticí zleva/zprava nemění hodnost.
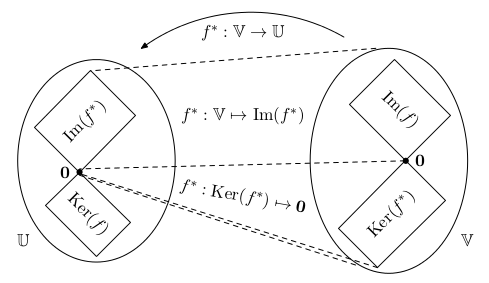
K lineárnímu zobrazení f : U ⟶ V je přiřazeno duální zobrazení f* : V ⟶ U, které má speciální vlastnosti. Povšimněme si, že inverzní zobrazeni f-1 : V ⟶ U zobrazuje mezi stejnými prostory (pokud existuje), avšak duální zobrazení je něco zcela jiného (například vždy existuje).
Definice přes skalární součin: Duální zobrazení f* : V ⟶ U je jediné zobrazení, které pro libovolné vektory x∊U a y∊V splňuje:
⟨f(x) | y⟩ = ⟨x | f*(y)⟩.
Povšimněme si, že levá strana rovnosti je skalární součin ve V, zatímco pravá v U.
Nechť A reprezentuje f vůči bázím X a Y.
Pro standardní skalární součin je f* reprezentováno AT. Tedy transpozice odpovídá dualitě.
Pro jaké báze reprezentuje AT zobrazení f*? Souřadnice bází X a Y můžeme popsat vůči kanonickým bázím maticemi přechodu X a Y (tedy jejich sloupcové vektory jsou souřadnice bazických vektorů).
Tvrzení: Pro standardní skalární součin je zobrazení f* jednoznačně určené a reprezentuje ho matice AT vůči duálním bázím Y* a X*, což jsou sloupcové vektory Y-T a X-T.
Důkaz: Dokažme to nejprve vůči kanonickým bázím. Nechť B je matice splňující ⟨Ax | y⟩ = ⟨x | By⟩. Zjevně pro B = AT to platí. Je to jediná taková matice, protože
Začneme příkladem soustava tří lineárních rovnic o třech neznámých:
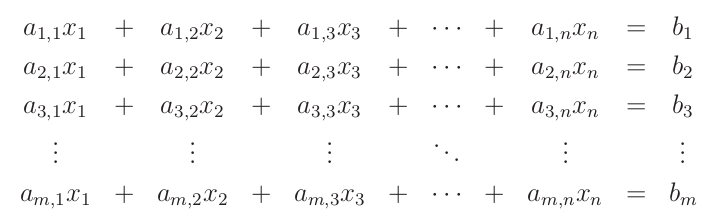
Obecně soustava m lineárních rovnic o n neznámých:
Čísla ai,j a bj jsou pevně zadaná a nazývají se koeficienty. Čísla xj se nazývají neznámé a jejich hodnoty chceme nalézt.
Hledáme množinu řešení tvořenou n-ticemi (x1,...xn) takovými, že po dosazení budou zároveň splněny všechny rovnice.
Tagy: #klicove
Nechť 𝜋 je permutace množiny {1,...,n}. Je reprezentována permutační maticí P. To je čtvercová matice n x n, jejíž koeficienty jsou nuly a jedničky, a
(P)i,j = 1, právě když 𝜋(i)=j.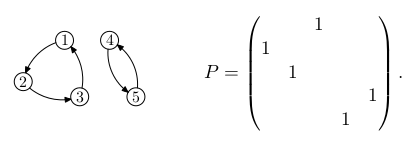
Nechť P𝜋 značí permutační matici reprezentující 𝜋. Čtenář si může rozmyslet a dokázat následující vlastnosti.
Součin permutačních je permutační matice, která reprezentuje složení příslušných permutací.
Tedy
P𝜋P𝜎 = P𝜋∘𝜎.
Každá permutační matice P je regulární, dokonce ortogonální, tedy existuje inverzní matice, která je také permutační. Pro ni platí, že
P𝜋-1 = P𝜋-1 = P𝜋T.
Snadné je přímo z definice ověřit, že tato inverze je oboustranná.
Permutační matice tvoří grupu. Podle Cayleyho věty je možné libovolnou grupu o n prvcích reprezentovat jako grupu permutací {1,...,n}. Proto je možné libovolnou grupu o n prvcích reprezentovat permutačními maticemi n x n. To přirozeně vede ke zkoumání pojmu maticových grup.
Rozlišujeme dva druhy trojúhelníkových matic. Typicky se uvažují čtvercové matice, ale definice funguje i pro obdélníkové.
Dolní trojúhelníková matice L má všechny koeficienty nad hlavní diagonálou nulové. Tedy (L)i,j = 0 pro i > j.
Horní trojúhelníková matice U má všechny koeficienty pod hlavní diagonálou nulové. Tedy (U)i,j = 0 pro i < j.
Diagonální matice jsou současně dolní a horní trojúhelníkové.
Nechť horní trojúhelníková matice U reprezentuje zobrazení vůči jedné bázi b1,...,bn. Protože Ubi leží v ⟨b1,...,bi⟩ (a podobně pro dolní trojúhelníkové matice L), je celá řada problému s trojúhelníkovými maticemi výrazně jednodušších. Například soustavy Lx = b a Ux = b lze řešit přímo substitucí. Je také jednoduché najít inverzní matice a určit vlastní čísla (prvky na diagonále).
Čtenář si může rozmyslet následující vlastnosti:
Nechť A je matice m x n. Její transpozice AT je matice n x m s následujícími koeficienty:
(AT)i,j = (A)j,i.
Tedy koeficienty matice AT vzniknou zrcadlením koeficientů A podle hlavní diagonály.
Pro matice s komplexními čísly se transpozice definuje jinak. Značí se AH a čísla jsou navíc komplexně sdružená (což odpovídá jinému skalárnímu součinu). Transpozice se často také značí A* (jak reálná, tak komplexní).
Pro transponované matice platí následující vztahy, rozmyslete si jejich důkazy z definice maticových operací:
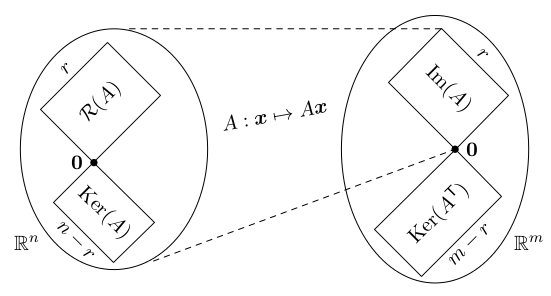
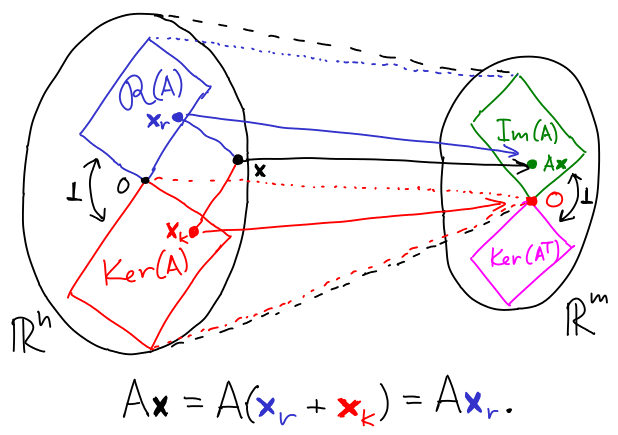
Nechť A je matice m x n s řádkovými vektory r1, ..., rm a sloupcovými vektory s1, ..., sn. Matice A definuje čtyři fundamentální podprostory:
Povšimněme si, že jádro a řádkový prostor jsou podprostory ℝn, zatímco levé jádro a sloupcový prostor jsou podprostory ℝm.
Fundamentální věta lineární algebry:
Poznamenejme, že vlastnost 1 platí nad obecným algebraickým tělesem. Vlastnosti 2 a 3 vyžadují ℝ (a při drobné změně definic fungují i nad ℂ).
Tagy: #klicove
Blokové matice jsou tvořené menšími maticemi, které se nazývají bloky. Můžeme definovat operace na blokových maticích kompatibilního typu. To umožňuje využívat blokový jazyk k efektivnímu popisu některých věcí.
Nechť A a B jsou dvě blokové matice velikosti 2n x 2n, tvořené čtyřmi bloky velikosti n x n.

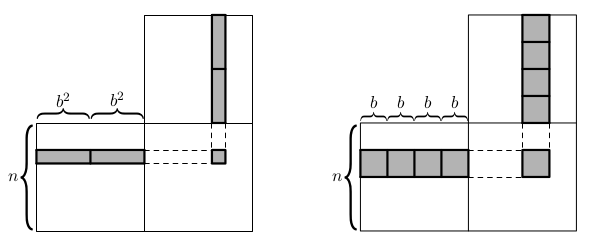
Blokové násobení se prakticky využívá při násobení velkých matic. Pro ně je potřeba číst koeficienty z paměti (řekněme RAM), která je mnohem pomalejší než rychlost výpočtů počítače. Řekněme, že násobíme matice velikosti n x n a do paměti dokážeme naráz načíst zhruba 2b2 koeficientů.
Pokud budeme postupovat podle definice, tak vždy určíme jeden koeficient AB vynásobením koeficientů řádku A a sloupce B. Na to potřebujeme udělat n/b2 čtení z paměti, tedy celkem n3/b2 součinů.
Místo toho rozdělíme obě matice na bloky b x b (pro jednoduchost nechť n je násobek b). Pro výpočet hodnot jednoho bloku AB musíme vynásobit jeden řádek bloků A s jeden sloupcem bloků B. Na to potřebujeme udělat n/b čtení. Bloků AB je n2/b2, tedy dohromady děláme n3/b3 čtení, což je b-krát efektivnější.
Matice A má hodnost 1, pokud je nenulová a každý její řádek/sloupec je násobek ostatních. Existuje elegantní zápis
A = xyT,
kde x a y jsou nenulové vektory.
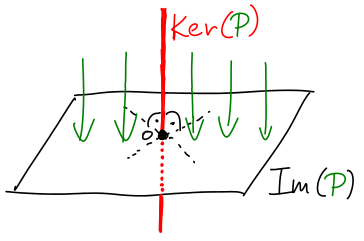
Lineární zobrazení f : U ⟶ V definuje dva fundamentální podprostory:
Na obrázku je naznačeno duální zobrazení spolu se svými fundamentálními podprostory.
Některé druhy matic se objevují v lineární algebře často, že se pro ně vyplatí mít speciální jména.
Jsou zajímavé ze dvou důvodu:
Diagonální matice D má všechny koeficienty mimo hlavní diagonálu nulové, tedy (D)i,j = 0 pro i ≠ j. Definice funguje i pro obdelníkové matice.
Jednotková matice In je diagonální matice n x n s jedničkami na diagonále.
Pokud reprezentují endomorfismus vůči jedné bázi, odpovídají natažení souřadních os. V případě jednotkové matice se jedná o identitu.
Tvrzení: Libovolné lineární zobrazení f je reprezentováno vůči vhodným bázím X a Y diagonální maticí, která má na diagonále pouze 1 a 0.
Důkaz: Nechť Xr je libovolná báze levého obrazu Im(f*) a Xk je libovolná báze jádra Ker(f). Zvolíme X = Xr ∪ Xk.
Protože f definuje izomorfismus mezi Im(f*) a Im(f), zobrazuje libovolnou bázi Im(f*) na bázi Im(f). Tedy f(Xr) je báze Im(f), kterou doplníme bází Ker(f*) a získáme druhou hledanou bázi Y. Protože f(Xk) = {0}, je zobrazení f reprezentováno vůči X a Y popsanou diagonální matici.
Tvrzení: Čtvercová matice A komutuje s každou čtvercovou maticí, právě když A=cIn.
Čtvercová symetrická matice A se nazývá pozitivně definitní, právě když platí jedna z následujících šesti ekvivalentních vlastností:
Skalární součin lze definovat konkrétně formulí nebo abstraktně pomocí vlastností.
Standardní skalární součin je definován výrazem
⟨x | y⟩ = xTy = ∑ xiyi = x1y1 + ⋯ + xnyn.
Abstaktní definice popisuje skalární součin jako libovolné zobrazení ℝn ⨯ ℝn ⟶ ℝ splňující vlastnosti:
Výraz xTy lze přirozeným způsobem zobecnit na xTAy, kde A je nějaká matice.

⟨x | x⟩ = 2x12 - 2x1x2 + 2x22 = x12 + x22 + (x1 - x2)2 > 0.
Výraz xTAy je obecně bilineární forma.

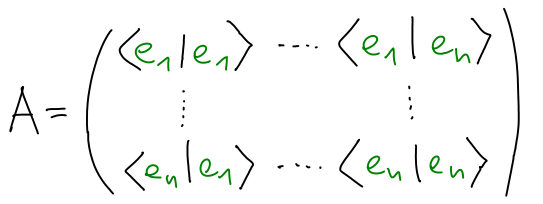 Jako A zvolíme Gramovu matici tvořenou skalárními součiny ⟨ei | ej⟩. Potom je ⟨x | y⟩ = xTAy. Z vlastností 2 a 3 skalárního součinu vyplývá, že A je symetrická pozitivně definitní matice.
Jako A zvolíme Gramovu matici tvořenou skalárními součiny ⟨ei | ej⟩. Potom je ⟨x | y⟩ = xTAy. Z vlastností 2 a 3 skalárního součinu vyplývá, že A je symetrická pozitivně definitní matice.
Matice Q se nazývá ortogonální, pokud má ortonormální sloupce (ortogonalita + normy rovné jedné). V maticovém zápisu dostáváme QTQ = In.
Tedy pro ortogonální matice platí, že Q-1 = QT. Protože inverze libovolné čtvercové matice je oboustranná, dostáváme navíc, že QQT = In. Tedy pokud má čtvercová matice ortonormální sloupce, má také ortonormální řádky, a také matice QT je ortogonální.
Cíl je nad vektorovým prostorem ℝn zavést další geometrické pojmy.
V matematice se často objevují prostory prvků (nemusí být vektorové prostory) obohacené nějakými geometrickými vlastnostmi. Dostáváme následující hierarchii možných geometrii:
skalární součin ⇒ norma ⇒ metrika ⇒ topologie.
Například prostor může být povrch koule, na kterém můžeme uvažovat geometrické vzdálenosti. Z těchto definic lze uvažovat topologii a metriku, ale nemůžeme definovat skalární součin a normu.
Čtvercová matice A se nazývá symetrická, pokud platí A=AT. Symetrické matice reprezentují endomorfismy, které jsou sami sobě duální.
Symetrické matice řadu speciálních vlastností, například jsou uzavřené na součiny a inverze.
Z lineární nezávislosti ortogonálních vektorů má pojem ortogonální báze smysl. Typicky navíc máme ortonormální s jednotkovou normou: není to klíčové, ale zjednodušuje to vzorce.
Tvrzení: Libovolnou ortogonální/ortonormální množinu nenulových vektorů lze rozšířit na ortogonální/ortonormální bázi.
Důkaz:
Doplníme ortonormální množinu na libovolnou bázi a aplikujeme Gram-Schmidtovu ortogonalizaci. Alternativní důkaz je možný přes fundamentální větu lineární algebry.
Tedy ortogonálních bází je spousta a jsou to hezké báze, mající řadu skvělých vlastností.
1. Ortonormální báze mají výhodné numerické vlastnosti.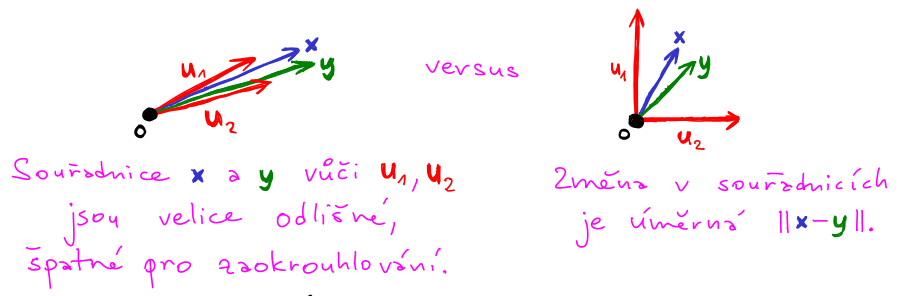
Jiný pohled je přes ortogonální matice: 𝛼 = QTQ𝛼 = QTx, pokud sloupce Q jsou ortonormální vektory v1, ..., vn.
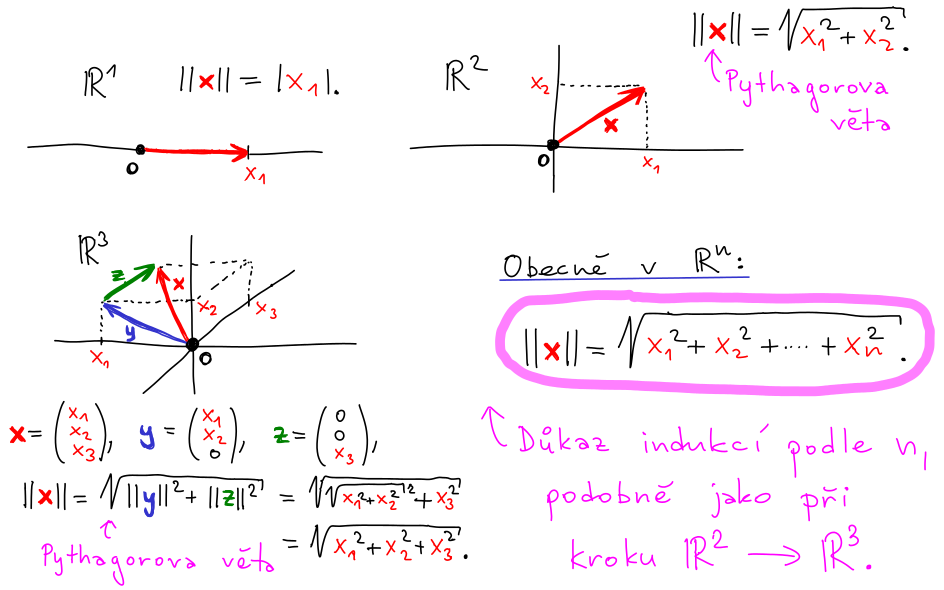
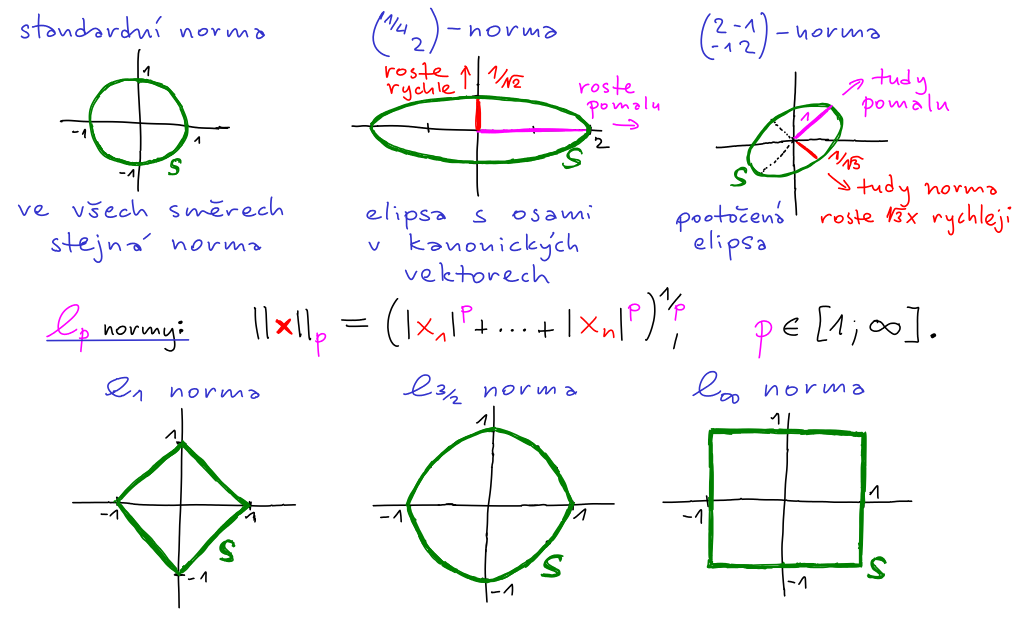
Norma ∥x∥ je geometrická délka vektoru x. Opět má různé definice.
Norma indukovaná skalárním součinem. Libovolný skalární součin ⟨x | y⟩ definuje normu ∥x∥ = √⟨x | x⟩. Například standardní skalární součin definuje standardní normu
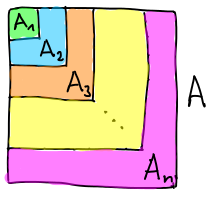
Nechť U je libovolný vektorový podprostor. Ortogonální doplněk U je množina
U⊥ = {x : x ⊥ y pro každé y ∊ U}.
Tvrzení: Ortogonální doplněk U⊥ má následující vlastnosti:
Fundamentální podprostory matice A jsou svoje ortogonální doplňky:
Ker(A) = R(A)⊥, Ker(AT) = Im(A)⊥.
Důkaz: Nechť x ∊ Ker(A) a u1, ..., um jsou řádky matice A. Z definice je
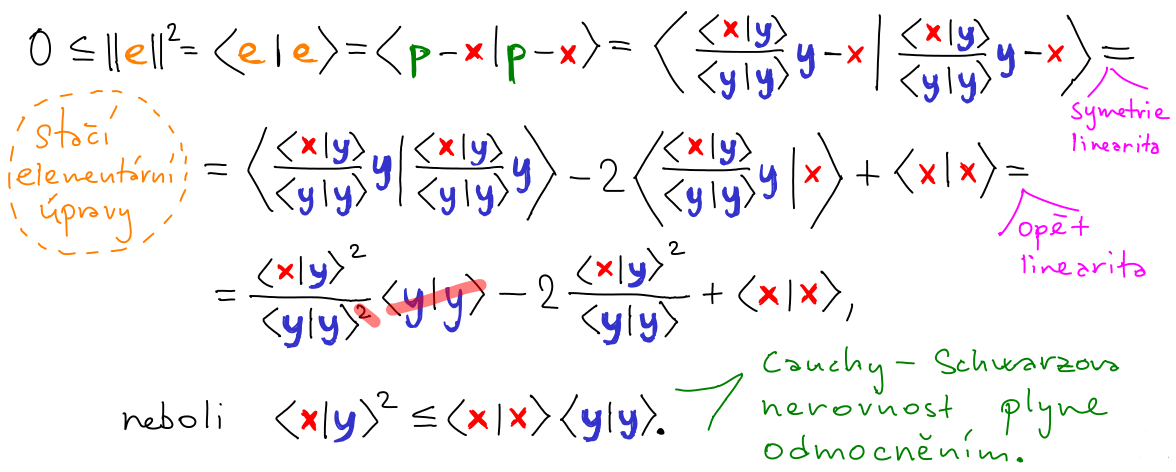
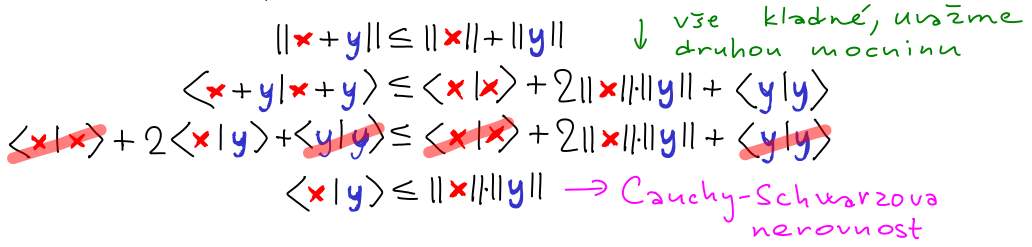
Věta: (Cauchy-Schwarz) Pro libovolné vektory x a y platí nerovnost
|⟨x | y⟩| ≤ ∥x∥*∥y∥.
Poznámka: Věta má následující aplikaci ve funkcionální analýze. Na prostoru funkcí můžeme definovat skalární součin a příslušnou indukovanou normu, například
Cosinová věta: Pro libovolné vektory x a y svírající úhel 𝜑 platí, že
⟨x | y⟩ = ∥x∥*∥y∥*cos(𝜑).
Skalární součin je kladný pro ostrý úhel 𝜑, nulový pro kolmý úhel 𝜑 a záporný pro tupý úhel 𝜑.
Uvažme kolmou projekci p vektoru x na vektor y. Platí, že norma ∥e∥ rozdílu projekce a vektoru e = p - x je nezáporná. Úpravou získáváme Cauchy-Schwarzovu nerovnost:
Podle charakterizace jsou normy indukované skalárním součinem tzv. A-normy ∥x∥A = √xTAx, kde A je symetrická pozitivně definitní matice. Norem však existuje mnohem víc než skalárních součinů.
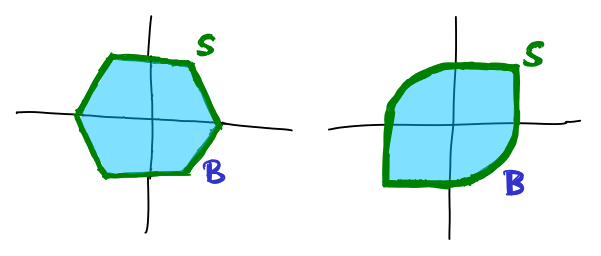
Uvažme pro danou normu jednotkovou sféru S a kouli B:
S = {x : ∥x∥ = 1}, B = {x : ∥x∥ ≤ 1}.
Geometrické vlastnosti sféry a koule.
Z axiomů normy můžeme vyvodit geometrické vlastnosti S a B.
 Tvrzení: Nechť B je uzavřená omezená podmnožina ℝn, symetrická podle počátku. Nechť S je hranice B a 0 ∉ S. Potom je zobrazení ∥⋅∥ : ℝn ⟶ ℝ, kde
Tvrzení: Nechť B je uzavřená omezená podmnožina ℝn, symetrická podle počátku. Nechť S je hranice B a 0 ∉ S. Potom je zobrazení ∥⋅∥ : ℝn ⟶ ℝ, kde
Matice A se nazývá normální, pokud komutuje se svoji transpozicí: AA* = A*A. Normální matice jsou zobecněním symetrických matic.
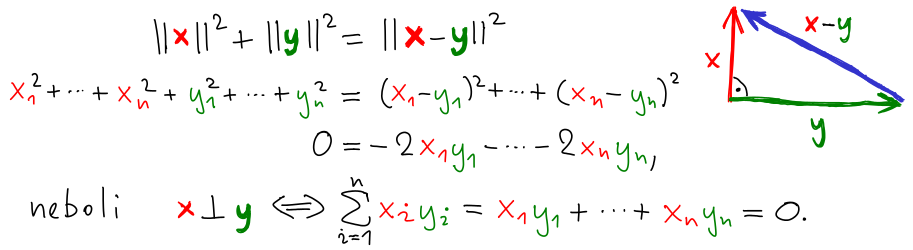
Vektory x a y jsou ortogonální neboli kolmé, právě když ⟨x | y⟩ = 0. Kolmost značíme x ⊥ y.
Odvození přes Pythagorovu větu. Vektory x a y jsou kolmé, právě když splňují Pythagorovu větu.
Podle definice je počátek 0 kolmý na všechny vektory.
Lemma: Nechť x1, ..., xn jsou nenulové po dvou ortogonální vektory, tedy xi ⊥ xj pro i ≠ j. Potom jsou vektory x1, ..., xn lineárně nezávislé.
Důkaz: Nechť 𝛼1*x1 + ⋯ + 𝛼n*xn = 0. Chceme dokázat, že všechna 𝛼i = 0. Vynásobíme-li celý výraz zleva xiT, dostáváme z ortogonality
0 = 𝛼1*xiTx1 + ⋯ + 𝛼i*xiTxi + ⋯ + 𝛼n*xiTxn = 𝛼i*xiTxi = 𝛼i*∥xi∥2.
Protože xi ≠ 0, víme, že 𝛼i = 0. Protože to platí při násobení libovolným xiT, je lineární kombinace 𝛼1*x1 + ⋯ + 𝛼n*xn triviální.
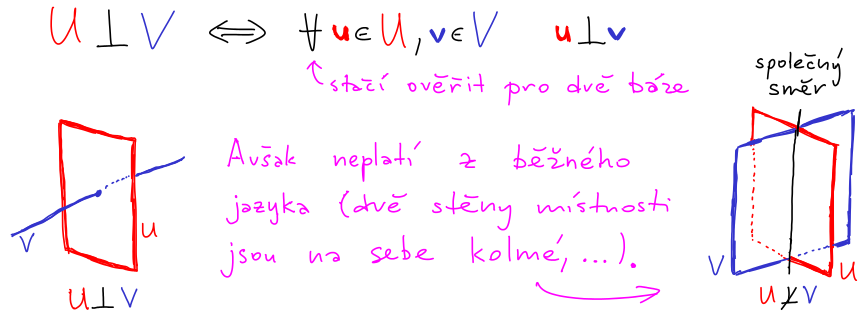
Kolmost vektorových podprostorů.
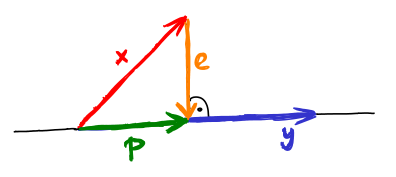
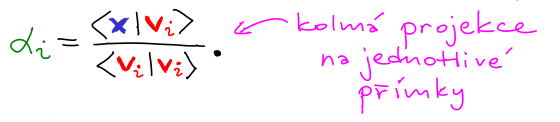
Víme, že p = c*y. Hledáme hodnotu c, aby vektor e = p - x byl kolmý na y:

Nechť P je matice kolmé projekce na podprostor Im(P). Splňuje dvě následující podmínky:
1. Charakteristika libovolné projekce: P2 = P.
Projekce je identita na Im(P), tedy Py = y pro libovolné y ∊ Im(P). Protože y = Px pro každé x, získáváme rovnost.
Zbytek plyne z duality, pokud ⟨Px | y⟩ = ⟨x | Py⟩. Zvolme
Tvrzení: Pokud sloupce matice A tvoří bázi podprostoru W, je kolmá projekce na W popsána maticí
P = A(ATA)-1AT.